
We’ve spent decades relying on the CAN bus, but let’s be honest—trying to run a modern autonomous car on traditional wiring is like trying to stream 4K video through a dial-up modem. The industry has reached a breaking point where bandwidth, weight, and complexity require something much more powerful.
That “something” is Automotive Ethernet.
It isn’t just a faster cable; it’s a total shift in philosophy. We’re moving away from “Signal-Based” communication (where sensors shout data blindly) to a Service-Oriented Architecture (SOA).
The Shift to Services
In the new world of Automotive Ethernet, everything revolves around the Service Interface. Think of it like a menu of options an ECU provides to the rest of the car. This interface is built from a few core building blocks:
- Methods: These are actions the car can take. They can be Request/Response (I ask for the temperature, you tell me) or Fire & Forget (I tell the window to roll down, and I don’t need a confirmation).
- Events: These are “heads-up” messages. The Server sends these to the Client automatically whenever something specific happens—like a pedestrian stepping into the camera’s view.
- Fields: These handle properties or statuses. They work as a Getter, Setter, or Notifier.
- Eventgroups: To keep things organized, we group these Events and Fields together for easier subscription management.
One important distinction for those coming from an AUTOSAR background: a “Client” in this Service-Oriented world isn’t exactly the same thing as an AUTOSAR Client/Server.
The Language of SOME/IP
To make these services talk to each other, we use SOME/IP (Scalable service-Oriented MiddlewarE over IP). Every packet sent has a specific “ID Badge” called the SOME/IP Header.
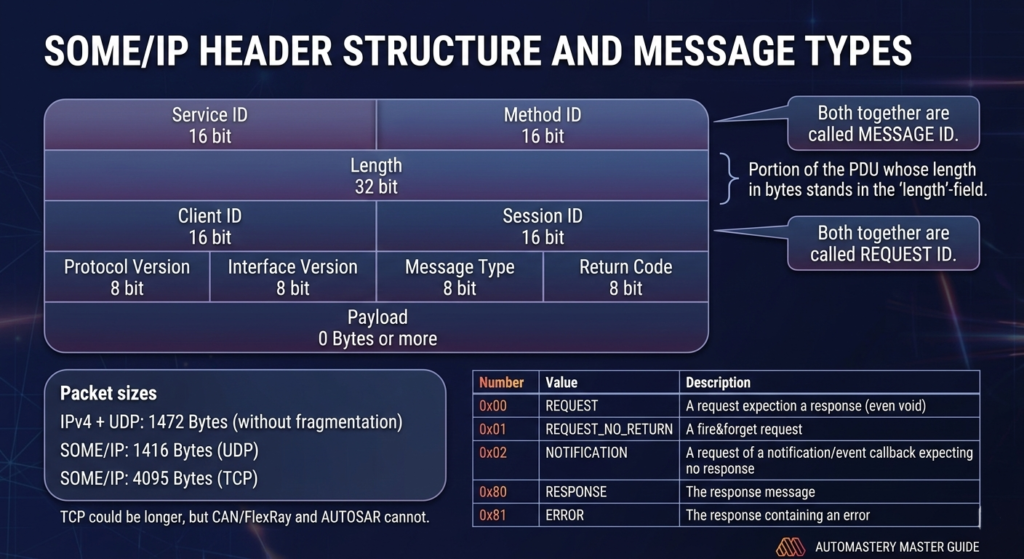
If you were to peel back the layers of a packet, here is the technical breakdown of that header:
- Message ID (32 bits): This tells us exactly who is talking and what they are doing. It’s made up of a 16-bit Service ID and a 16-bit Method ID.
- Request ID (32 bits): This tracks the specific “conversation”. It combines a 16-bit Client ID with a 16-bit Session ID.
- Length (32 bits): This explicitly defines how much data is in the payload.
When it comes to size, these packets are significantly beefier than old CAN frames. While a standard UDP packet is 1416 bytes, a TCP packet can go up to 4095 bytes. Standard CAN or FlexRay protocols simply can’t handle those volumes.
Decoding the Message Types
Not every message has the same job. The Message Type field in the header tells the receiver exactly what the packet’s purpose is:
- 0x00 (REQUEST): A standard “I need something” message that expects a response.
- 0x01 (REQUEST_NO_RETURN): A “Fire & Forget” command.
- 0x02 (NOTIFICATION): Used for events or callbacks where no response is needed.
- 0x80 (RESPONSE): The answer sent back to the client.
- 0x81 (ERROR): A response that lets the client know something went wrong.
The Bottom Line
Automotive Ethernet is turning cars into rolling server rooms. By using SOME/IP and Service Discovery, manufacturers can finally build vehicles that are scalable, updateable, and ready for the massive data demands of the future.